AI-powered humanoid robot taught itself to walk
Researchers created a human-sized robot equipped with artificial intelligence (AI) capabilities that enable it to teach itself how to walk
[Dec. 26, 2023: JD Shavit, The Brighter Side of News]
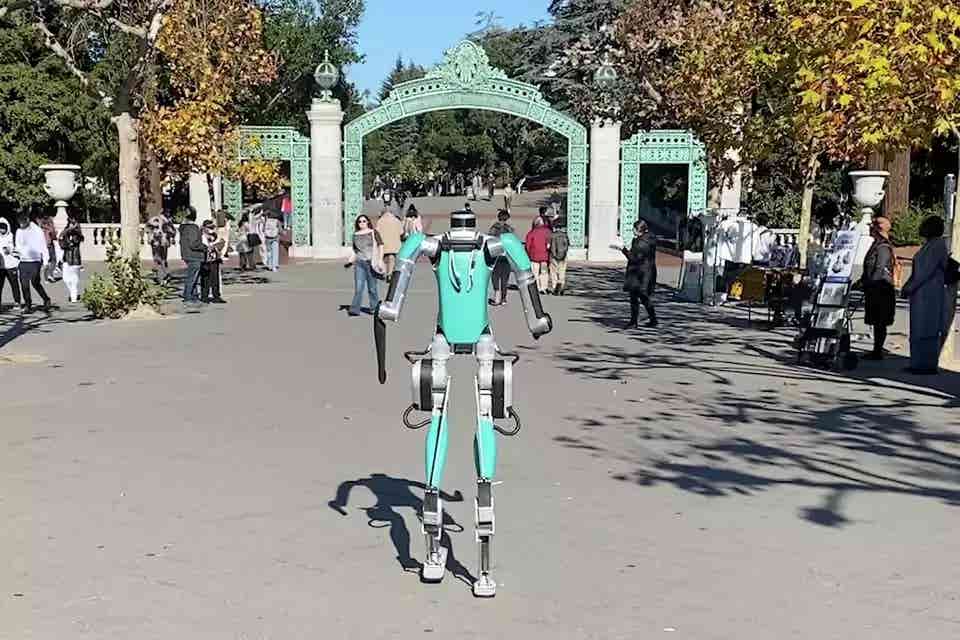
A team of Berkeley researchers' newly trained robot walks out of Sather Gate. (CREDIT: UC Berkeley Humanoid Team)
In a groundbreaking development at the University of California, Berkeley, researchers have created a human-sized robot equipped with artificial intelligence (AI) capabilities that enable it to teach itself how to walk in the real world. This teal-colored robot, while showcasing impressive adaptability in traversing various terrains on the campus, has yet to conquer the challenge of navigating steps.
As the era of humanoid robots emerges as a transformative force in the field of robotics, the ability of these machines to effectively operate in diverse environments remains paramount.
The Inspiration: Reinforcement Learning and Walking
The driving force behind this cutting-edge research was the concept of "reinforcement learning," a phenomenon that gained widespread recognition last year, largely thanks to the advancements in large language models (LLMs). Ilija Radosavovic and Bike Zhang, researchers at UC Berkeley, pondered the possibility of employing reinforcement learning to enable robots to adapt to ever-changing circumstances.
To test their hypothesis, they embarked on a journey that began with one of the most fundamental human functions: walking.
The researchers initiated their exploration within the realm of simulations, where they ran billions of scenarios using Isaac Gym, a high-performance GPU-based physics simulation environment.
The underlying algorithm within this simulator rewarded actions that closely resembled human-like walking while penalizing those that deviated from this ideal. Once the simulation perfected the walking task, the knowledge was seamlessly transferred to a real-world humanoid robot, requiring no further fine-tuning.
Related Stories
The Transformer Model: Enabling Adaptive Learning
At the heart of this learning system lies a deep-learning model, popularly known as a "transformer." Typically utilized in LLMs for predicting the next element in a sequence of data, the researchers adapted it to a "causal transformer" that learns from observations and actions, predicting the consequences of actions instead.
This transformative approach enables the humanoid robot to adjust its actions in response to a novel landscape, even if it has never encountered such a terrain before.
Over the past year, the humanoid robot has strolled across the UC Berkeley campus, deftly navigating patches of grass and roads. Intriguingly, researchers observed that the robot had acquired "emergent" traits that were not explicitly programmed into the algorithm. For instance, as the humanoid robot moves its right foot forward, it instinctively swings its left arm, mimicking the natural movements of a human walker.
we have trained a humanoid transformer with large-scale reinforcement learning in simulation and deployed it to the real world zero-shot pic.twitter.com/WzOIMQXTaD
— Ilija Radosavovic (@ir413) December 10, 2023
Additionally, when descending slopes, the robot takes smaller steps to maintain balance—a behavior reminiscent of human locomotion. Remarkably, these traits have developed without the aid of external sensors to perceive the environment.
While these achievements are impressive, the robot still faces limitations. Its gait lacks the refinement of human walking, resulting in somewhat jerky movements. On harder surfaces like concrete or asphalt, the robot's steps bear a resemblance to a military march. Perhaps the most significant challenge lies in the fact that the robot is unaware of obstacles until it physically collides with them.
A screenshot of one of the team's simulations shows the digitized robots traversing different terrains. (CREDIT: UC Berkeley Humanoid Team)
Despite these limitations, the research team views their progress as a promising starting point for a self-learning humanoid robot. The potential applications for such adaptable machines in both home and industrial settings are vast, although there is still much work to be done.
Researchers aim to refine the robot's gait, making it more closely resemble human locomotion. Additionally, addressing the robot's ability to detect obstacles in its path represents a crucial challenge to ensure safe and efficient navigation in complex environments.
While there are hurdles to overcome, the strides made by researchers at UC Berkeley underscore the potential for AI-powered humanoid robots to become integral components of our future.
For more science and technology news stories check out our New Innovations section at The Brighter Side of News.
Note: Materials provided above by The Brighter Side of News. Content may be edited for style and length.
Like these kind of feel good stories? Get the Brighter Side of News' newsletter.