Team creates micro-robots propelled by air bubbles and ultrasound
Some engineers find inspiration in the mechanics of bird flight and the architecture of bee nests. Others think much smaller.
[Sept 24, 2021: David Nutt, Cornell University]
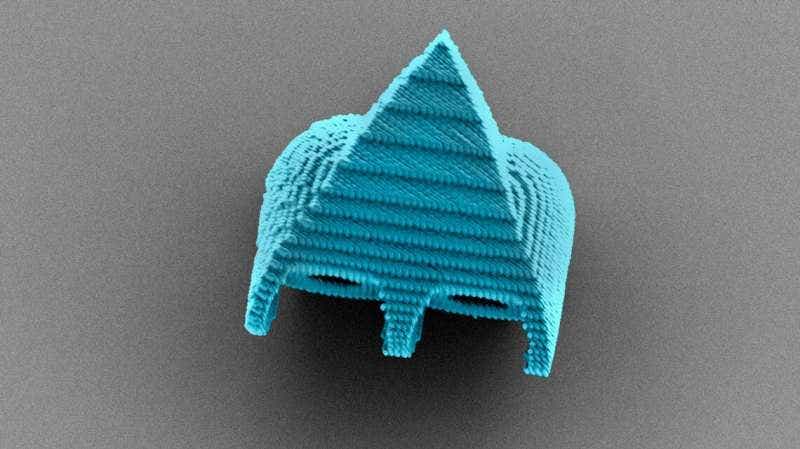
A scanning electron microscope image shows a cell-size robotic swimmer that can be powered and steered by ultrasound waves. (Credit: Cornell University)
Some engineers find inspiration in the mechanics of bird flight and the architecture of bee nests. Others think much smaller.
A team led by Mingming Wu, professor of biological and environmental engineering in the Cornell University College of Agriculture and Life Sciences, created cell-size robots that can be powered and steered by ultrasound waves. Despite their tiny size, these micro-robotic swimmers—whose movements were inspired by bacteria and sperm—could one day be a formidable new tool for targeted drug delivery.
The team's paper, "Biologically Inspired Micro-Robotic Swimmers Remotely Controlled by Ultrasound Waves," published Sept. 22 in Lab on a Chip, a publication of the Royal Society of Chemistry.
The paper's lead author is former postdoctoral researcher Tao Luo.
For more than a decade, Wu's lab has been investigating the ways microorganisms, from bacteria to cancer cells, migrate and communicate with their environment. The ultimate goal was to create a remotely controlled micro-robot that could navigate in the human body.
"We can make airplanes that are better than birds nowadays. But at the smallest scale, there are many situations that nature is doing much better than us. Bacteria, for example, have had billions of years of evolution to perfect their way of doing things," Wu said. "That led us to think that we can actually engineer something similar. If you can send medicine to a targeted area, like cancer cells, then you won't have as many side effects."
Among their more ingenious attributes are the fact that bacteria can swim 10 times their body length in one second and sperm can swim against the flow, Wu said.
Wu's research team initially tried to design and 3D print a micro-robot that mimicked the way bacteria use flagellum to propel themselves. However, like the early aviators whose cumbersome airplanes were too birdlike to fly, that effort collapsed. When Luo joined Wu's lab, they began exploring a less literal approach. The primary hurdle was how to power it. As a person must crawl before they can walk, a micro-robot needs to be energized before it can swim.
"Bacteria and sperm basically consume organic material in the surrounding fluid, and that is sufficient to power them," Wu said. "But for engineered robots it's tough, because if they carry a battery, it's too heavy for them to move."
The team hit upon the idea of using high-frequency sound waves. Because ultrasound is quiet, it can be easily used in an experimental lab setting. As an additional bonus, the technology has been deemed safe for clinical studies by the U.S. Food and Drug Administration.
Cornell University scientists have created cell-sized swimming robots that can be steered by ultrasound waves. (Credit: Cornell University)
However, the team was stumped by the fabrication process. Working with the Cornell NanoScale Science and Technology Facility (CNF), Luo tried to create a prototype with photolithography, but it was time-consuming, and the results were unusable.
The project received a crucial boost when CNF purchased a new laser lithography system called a NanoScribe, which creates 3D nanostructures by direct-writing onto a photosensitive resin. The technology enabled the researchers to easily tweak their designs at the micrometer scale and produce new iterations quickly.
Within six months, Luo had created a triangular micro-robotic swimmer that looks like an insect crossed with a rocket ship. The swimmer's most important feature is a pair of cavities etched in its back. Because its resin material is hydrophobic, when the robot is submerged in solution, a tiny air bubble is automatically trapped in each cavity. When an ultrasound transducer is aimed at the robot, the air bubble oscillates, generating vortices—also known as streaming flow—that propel the swimmer forward.
Cornell University scientists have created cell-sized swimming robots that can be steered by ultrasound waves. (Credit: CORNELL UNIVERSITY)
Other engineers have previously built "single bubble" swimmers, but the Cornell researchers are the first to pioneer a version that uses two bubbles, each with a different diameter opening in their respective cavity. By varying the sound waves' resonance frequency, the researchers can excite either bubble—or tune them together—thereby controlling which direction the swimmer is propelled.
The challenge ahead will be to make the swimmers biocompatible, so they can navigate among blood cells that are roughly the size as they are. Future micro-swimmers will also need to consist of biodegradable material, so that many bots can be dispatched at once. In the same way that only a single sperm needs to be successful for fertilization, the volume is key.
"For drug delivery, you could have a group of micro-robotic swimmers, and if one failed during the journey, that's not a problem. That's how nature survives," Wu said. "In a way, it's a more robust system. Smaller does not mean weaker. A group of them is undefeatable. I feel like these nature-inspired tools typically are more sustainable, because nature has proved it works."
Like these kind of feel good stories? Get the Brighter Side of News' newsletter.
Tags: #New_Innovations, #Micro_Robots, #3D_Printing, #Ultrasound, #Science, #Technology, #Research, #The_Brighter_Side_of_News