Scientists create a mini robot to simplify dental care
A miniature dental robot may one day help prepare teeth for crowns faster, with more precise drilling and fewer appointments.

 Edited By: Joseph Shavit
Edited By: Joseph Shavit
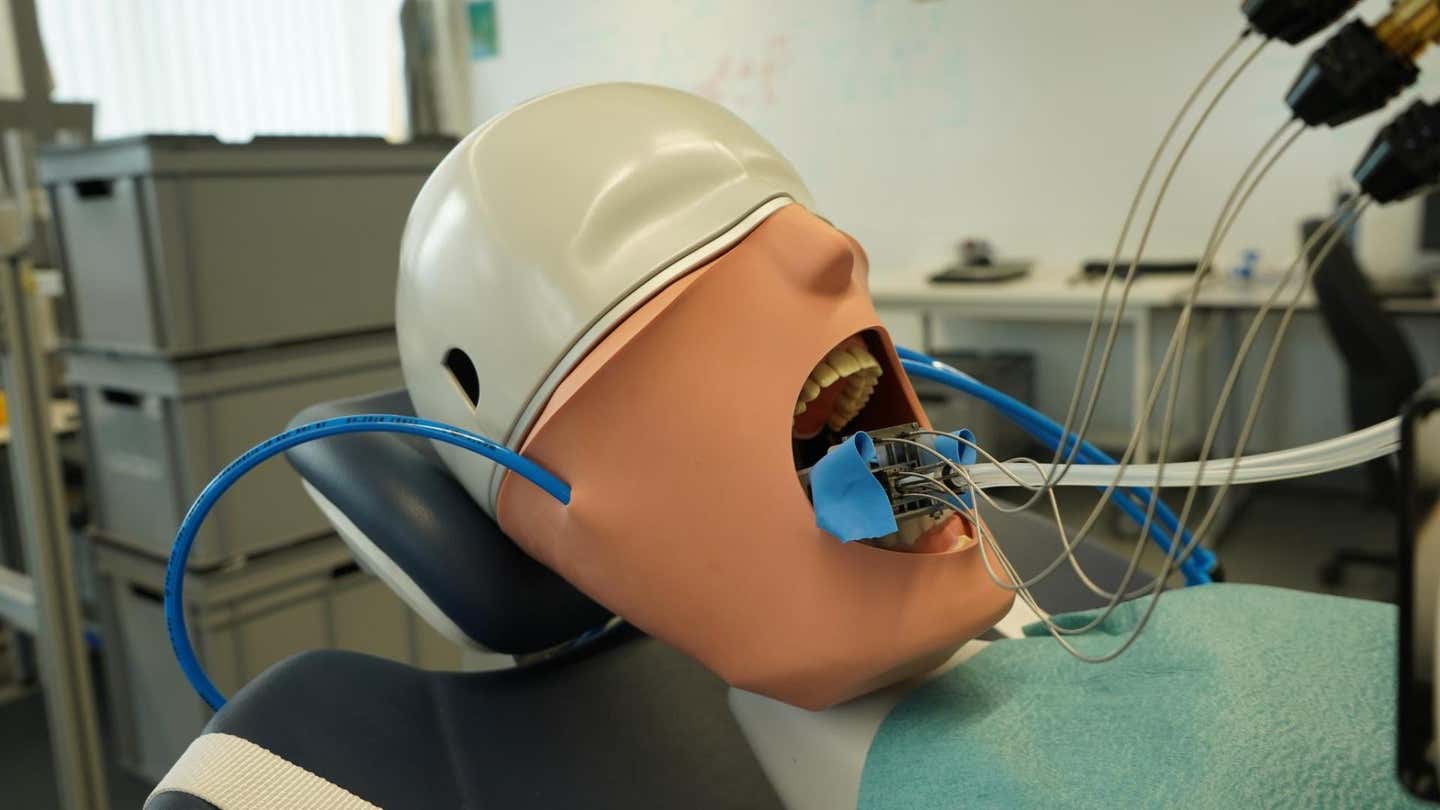
A tiny dental robot prepared crown shapes with sub-millimeter precision in bench tests, pointing to faster dental treatment. (CREDIT: University of Basel, Catherine Weyer)
A tooth that needs a crown usually brings more than one unpleasant surprise. There is the damage itself, then the drilling, then the waiting, and often another trip back to the dentist before the work is finished.
A team in Switzerland is trying to compress that process with a dental robot small enough to sit inside an open mouth. The device, called MIR for Miniature Intraoral Robot, is designed to prepare a tooth according to a digital plan, potentially allowing a crown to be made in advance and placed much sooner.
The prototype comes from the Department of Biomedical Engineering at the University of Basel, working with partners at the University of Zurich, the University of Bern, and Camlog Biotechnologies GmbH. First author Dr. Yukiko Tomooka and her colleagues describe the system in IEEE Transactions on Medical Robotics and Bionics.
The idea is simple, at least on paper. A patient would first receive a dental scan. Based on that scan, the dentist could plan exactly how much tooth material should be removed and order the final restoration before the preparation step happens. During a later visit, the robot would carry out that plan with the goal of making the restoration fit right away.
Built to move with the patient, not around them
Most robotic systems proposed for tooth preparation have relied on large robotic arms fixed outside the patient. Those systems can work, but they come with obvious drawbacks in a dental chair. They are bulky, they can crowd the workspace, and they must constantly account for patient movement.
MIR takes a different approach. Instead of working from outside the mouth, it is meant to mount inside the mouth on a custom-fitted fixation piece. In the researchers’ proposed workflow, that personalized support would be made from the same scan used to plan the crown.
That matters because the robot would move with the patient rather than chase the patient’s movements from a distance. “Even if the patient turns their head, the MIR moves with them,” Tomooka said.
The prototype itself is compact, measuring 43.0 by 26.4 by 27.6 millimeters, about the size of a wine cork. Its motors and controller stay outside the mouth near the dental chair. Motion, bur rotation, and cooling are transmitted through flexible shafts, cables, and tubes. “It is designed to be small enough to fit comfortably into an open mouth,” Tomooka said.
The robot was built with autoclave-compatible materials including titanium grade 5 and stainless steel. The team said that future versions with electronics may require a revised sterilization strategy.
Why tooth preparation is hard to standardize
Preparing a tooth for a crown is not just a matter of removing decay. Dentists must also shape the remaining tooth so a restoration can fit, hold, and last. That often means removing some healthy tooth structure too. The paper notes that traditional crown preparations may remove up to 75.6 percent of tooth structure to create enough space for the final restoration.
That is one reason the researchers are interested in a more controlled digital workflow. If preparation can be planned in advance and executed more predictably, the amount of removed material might be reduced. The authors also point to the rise of minimally invasive partial restorations, which aim to preserve more natural tooth structure and may carry fewer biological complications than conventional crowns in short- to mid-term follow-up.
There is another challenge: heat and force. During tooth preparation, excessive force, speed, or grinding time can damage tissue and affect pulp vitality. In ordinary clinical practice, dentists must balance those factors in real time while working in a small, awkward space.
The Basel team’s first goal was not to solve every clinical problem at once. It was to show that a miniature robot could physically perform the kind of motion needed for tooth preparation, and do it with useful precision.
To do that, the robot prepares material in two stages. First, it uses a wider bur to reduce the top of the tooth. Then it switches to a longer, thinner bur for the sides. That two-step method allows the device to reach more of the tooth without making the robot itself larger.
Test bench results, not the dentist’s chair, for now
So far, MIR has only been tested on the bench, not in patients. The team evaluated it in two kinds of experiments: one to measure positioning accuracy while moving through the air, and another to test grinding performance on cylindrical workpieces.
Those workpieces were made from two dental materials. One was a synthetic resin used for temporary crowns. The other was a dental hybrid ceramic with hardness closer to natural tooth enamel.
In the positioning tests, the robot followed a predefined conical path. Using an optical tracking system, the researchers found an average positioning error of 0.18 millimeters relative to the preplanned path, with a maximum error of 0.47 millimeters. When the path was compared with a best-fit circle rather than the original planned circle, the average error dropped to 0.087 millimeters, with a maximum of 0.33 millimeters.
That distinction matters. The robot’s absolute positioning is not yet where the team wants it, but its path consistency was already within the range the authors describe as necessary for dental work.
The grinding tests also offered mixed but encouraging results. The robot successfully milled a stepped conical shape in both resin and ceramic. The average absolute surface error between the planned and actual ground shapes was 0.176 millimeters for both materials. Maximum absolute error reached 0.593 millimeters in resin and 0.708 millimeters in the hybrid ceramic.
The forces stayed below 5 newtons during grinding, meeting the group’s stated requirement. That is roughly comparable to the gravitational force of a half-liter bottle of water.
The missing pieces are the important ones
For all the promise, the current system still has clear limits. MIR does not yet include onboard sensors that directly measure its own position. Instead, the prototype relied on motor encoders located about 30 centimeters away, with motion transmitted through flexible shafts, worm gears, and lead screws. That setup can introduce transmission loss, elasticity, backlash, and other sources of error.
The optical tracking system used in the tests is not a practical clinical solution either. Inside a real mouth, line-of-sight can be blocked, which makes reflective marker tracking unreliable.
That is why the next version is expected to include sensors and a camera. The goal is closed-loop control, allowing the robot to know where it is, track its progress, and continue safely even after an interruption. “Even after a power outage, MIR would know where it is and where it needs to continue based on the sensor data,” said research group leader Professor Georg Rauter.
The team also still needs to test the robot in conditions that look more like an actual mouth, with neighboring teeth, limited opening, and surrounding soft tissue. The current work used rigid bench fixtures, not living patients.
Even so, the prototype clears an important early hurdle. It shows that a patient-mounted robot, rather than a room-sized robotic arm, may be able to carry out sub-millimeter tooth preparation in a compact space.
Practical implications of the research
If later versions reach clinical use, the main payoff could be simpler crown treatment. A dentist could scan the tooth, digitally plan the preparation, and order a restoration before the drilling step happens. That could cut down on repeat visits or reduce chair-side waiting.
The approach could also make treatment more consistent by reducing dependence on manual shaping alone. In the longer run, it may help preserve more healthy tooth structure if the final preparation can stay closer to the digital plan.
For now, though, MIR remains an early prototype. It has shown bench-top feasibility, not clinical readiness.
Research findings are available online in the journal IEEE Transactions on Medical Robotics and Bionics.
The original story "Scientists create a mini robot to simplify dental care" is published in The Brighter Side of News.
Related Stories
- Scientists discover why smoking loosens teeth and eats away at bone
- Autonomous microrobot sets new standard for precision surgery deep inside the body
- Shapeshifting microrobots can brush and floss teeth
Like these kind of feel good stories? Get The Brighter Side of News' newsletter.
Mac Oliveau
Writer
Mac Oliveau is a Los Angeles–based science and technology journalist for The Brighter Side of News, an online publication focused on uplifting, transformative stories from around the globe. Having published articles on MSN, and Yahoo News, Mac covers a broad spectrum of topics including medical breakthroughs, health and green tech. With a talent for making complex science clear and compelling, they connect readers to the advancements shaping a brighter, more hopeful future.